
Chippendale Connected and Automated Vehicle Trial
The Chippendale Connected and Automated Vehicle (CAV) Trial is driving safer outcomes for our customers and community.
Transport for NSW are working towards zero road fatalities by 2050. New connected and automated vehicle technologies, along with Cooperative Intelligent Transport Systems (C-ITS), are being trialled to support safer vehicles. These innovations aim to contribute to a safer road network by helping vehicles see around corners, reduce blind-spots, improve perception, and reduce the likelihood of crashes with vehicles, pedestrians, and other road users.
Each year around 93 pedestrians are killed on roads in Greater Sydney and another 2,255 pedestrians are seriously injured. Connected and automated vehicle technologies with advanced detection systems are being trialled seeking to reduce the likelihood and consequence of vehicle to pedestrian collisions.
Since 2019 Transport for NSW have partnered with iMOVE CRC, and the University of Sydney Australian Centre for Robotics (ACFR) to deliver the Chippendale Connected and Automated Vehicle Trial.
The Chippendale Connected and Automated Vehicle Trial is designed to explore how connected and automated vehicles can improve pedestrian and road user safety. In addition, the trial supports government and industry planning for CAV readiness and integration.
During the trial, the level 3 connected and automated vehicle, named “Chip” has been driving through real-world testbeds and operating environments in Camperdown and Chippendale, Sydney.
Image
Image controls:
Trial objectives
- Develop guidelines and recommendations for CAVs to operate safely in complex and non-complex environments, and as part of an integrated transport network
- Assess the impacts of CAVs when operating in different environments with special attention placed on high density pedestrian areas
- Establish a number of real-world testbed sites for CAVs in varying complexity environments for further research in evaluating emerging CAV and Cooperative Intelligent Transportation Systems (C-ITS) technology
- Improve industry understanding of the physical and digital infrastructure needed to support the safe introduction of CAVs in NSW.
Image

Image controls:
Key milestones
Phase 1 – Interaction With Road Users (November 2019 to November 2020)
Phase 1 of the trial was hosted at the University of Sydney campus. The project team tested the CAV in a low-density urban environment and in both open and closed roads.
During this period the team sought to identify how the CAV would interact with pedestrians and other vehicles in a controlled manner. The vehicle route was simple and covered 250m of road within the University of Sydney campus.

Phase 1: CAV route at the University of Sydney
Phase 2 – Adding Complexity (December 2020 to December 2021)
Phase 2 occurred for an additional 12 months at the University of Sydney Campus. During this phase the project team wanted to understand how the CAV would operate and adjust in more complex urban and pedestrian environments. New testing complexities were incorporated including:
- Other vehicle detection, and safety interactions
- Vulnerable Road Users (VRUs) detection and safety interactions
- Other Vehicle-to-Vehicle (V2V) protocols and communication systems.

Phase 2: CAV route at the University of Sydney
Phase 3 – Testing On Road (January 2022 to March 2023)
The final phase of the trial was held across two locations. The CAV went through testing at the Future Mobility Testing and Research Centre (FMTRC) and then travelled through the streets of Chippendale, Sydney.
The aim of this phase was to demonstrate safe operating principles or interaction rules with other vehicles, pedestrians, and stationary objects, such as bollards for redirecting traffic or parked cars, in live traffic conditions.
New trial tests and features were added in this phase to understand connected and automated vehicle urban capabilities including:
- New perception pipeline activity - to achieve longer and more stable object detection around the CAV.
- Corporative Intelligent Transport Systems (C-ITS) testing activity at intersections to understand how the CAV would communicate with existing road infrastructure.
- New localisation strategy - based on a sensor fusion approach to address significant challenges in localisation for built-up areas.
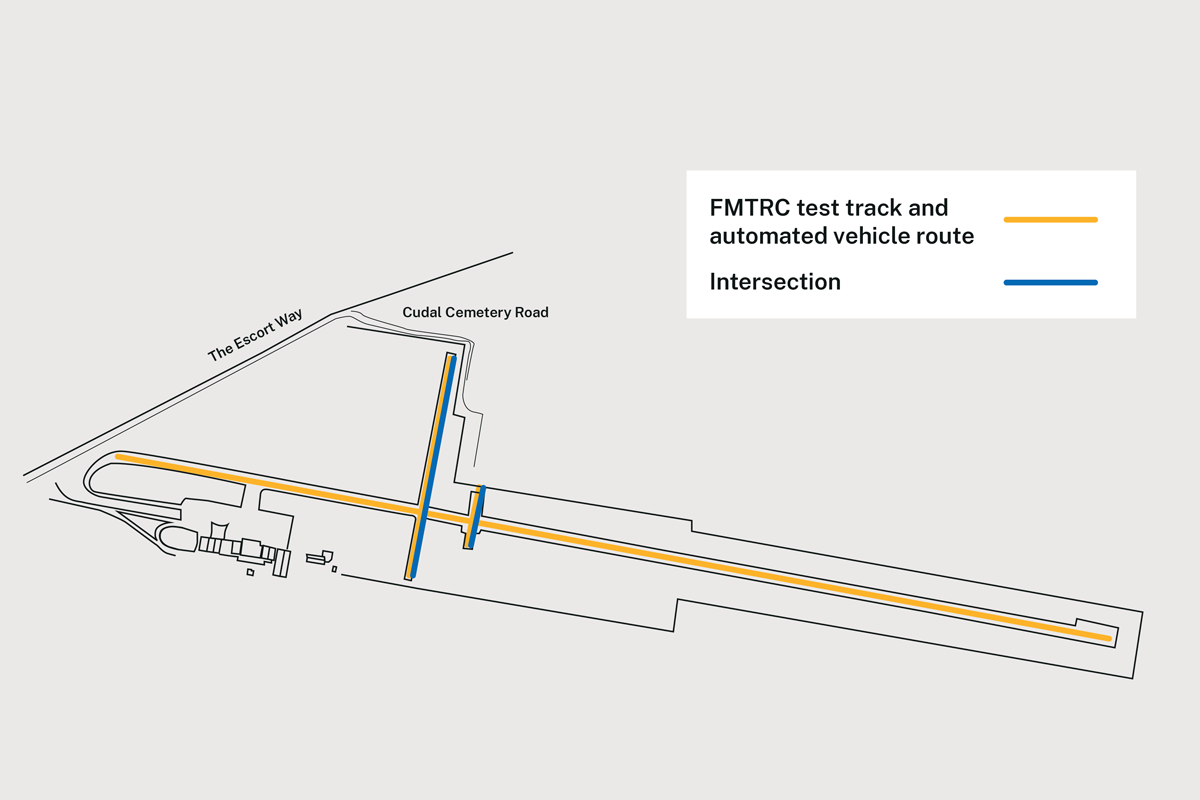
Phase 3: CAV route at the Transport for NSW Future Mobility Testing and Research Centre (FMTRC)

Phase 3: CAV route through Chippendale, Sydney
Phase 4 – C-ITS Integration (March 2023 to present date)
To enhance learnings for Phase 4, the Transport for NSW Sydney Coordinated Adaptive Traffic Systems (SCATS) and Future Mobility teams upgraded infrastructure by retrofitting existing traffic lights with a Roadside Unit (RSU). This RSU enables effective communication between automated vehicles and traffic lights in real, live traffic conditions.
The RSU uses dedicated short-range communication (DSRC) to send Signal Phase and Timing (SPaT) and MAP messages to the vehicle’s on-board unit (OBU). The SPaT message provides essential information on traffic signal status and timing, helping the vehicle decide whether to stop or proceed through an intersection.
This phase will focus on:
- Navigation strategies for integrating traffic light signals using SPaT messages
- Navigation strategies for non-signalized intersections through vehicle-to-infrastructure communication, especially when the vehicle does not have the right of way
- Fusion of information across platforms within the same network to determine navigation strategies
- Cooperative navigation of connected vehicles by sharing intentions
- Cooperative perception with other agents in the network
- Specific safety use cases, including red-light violations and turn warnings for vulnerable road users.

Dr. Stewart Worrall, ACFR, testing vehicle to traffic light communications. Photo credit: ACFR
Trial learnings and key achievements to date
The Chippendale Connected and Automated Vehicle Trial has already provided many learnings to inform the State Government and industry on how to adapt new road safety technology into future CAVs tested and delivered in NSW. Key trial achievements to date include:
- Development and demonstration of autonomous driving throughout the trial has led to an improved understanding of the interactions between CAVs, Vulnerable Road Users (VRUs) and other road occupants in various real-world scenarios
- Establishment of the Chippendale C-ITS site which has enabled testing and evaluation of emerging C-ITS technology.
Learn more
To learn more you can get in touch with the project team by emailing: future.mobility@transport.nsw.gov.au